IDTechEx discute su come i sensori vengono utilizzati per ottenere sicurezza e controllo accurato nella robotica del XXI secolo
Feb 13, 2023
Con l'aumento della domanda di automazione nel 21st secolo, i robot hanno avuto una crescita rapida e senza precedenti in molti settori, tra cui la logistica, il magazzino, la produzione e la consegna di alimenti.
L'interazione uomo-robot (HRI), il controllo preciso e la collaborazione sicura tra uomo e robot sono le pietre miliari dell'adozione dell'automazione. La sicurezza si riferisce a molteplici compiti nel contesto dei robot, come il rilevamento delle collisioni, l'evitamento degli ostacoli, la navigazione e la localizzazione, il rilevamento della forza e il rilevamento della prossimità. Tutti questi compiti sono resi possibili da una serie di sensori, tra cui LiDAR, sensori di immagine/visione (telecamere), sensori tattili e sensori a ultrasuoni. Con il progresso della tecnologia di visione artificiale, le telecamere stanno diventando sempre più importanti nei robot.
Principio di funzionamento dei sensori in robotica - Sensori di visione/telecamere
I CCD (charge-coupled device) e i CMOS (complementary metal oxide semiconductor) sono tipi comuni di sensori di visione. Un sensore CMOS è un dispositivo digitale che converte la carica di ciascun pixel nella tensione corrispondente; il sensore include tipicamente amplificatori, circuiti di correzione del rumore e di digitalizzazione. Al contrario, un sensore CCD è un dispositivo analogico che contiene una serie di siti fotosensibili. Sebbene ognuno di essi abbia i suoi punti di forza, con lo sviluppo della tecnologia CMOS, i sensori CMOS sono ora ampiamente considerati adatti alla visione artificiale nei robot, grazie al loro ingombro ridotto, al costo inferiore e al minor consumo di energia rispetto ai sensori CCD. I sensori di visione possono essere utilizzati per la stima del movimento e della distanza, l'identificazione degli oggetti e la localizzazione. Il vantaggio dei sensori di visione è che possono raccogliere un numero significativamente maggiore di informazioni con un'alta risoluzione rispetto ad altri sensori come LiDAR e sensori a ultrasuoni. Il diagramma seguente mette a confronto diversi sensori sulla base di nove parametri di riferimento. I sensori di visione hanno un'elevata risoluzione e costi contenuti. Tuttavia, sono intrinsecamente suscettibili alle condizioni atmosferiche avverse e alla leggerezza; pertanto, spesso sono necessari altri sensori per aumentare la robustezza complessiva del sistema quando i robot lavorano in condizioni atmosferiche imprevedibili o su terreni difficili. Un'analisi e un confronto più dettagliati di questi parametri di riferimento sono contenuti nell'ultimo rapporto di IDTechEx, "Sensori per la robotica 2023-2043: tecnologie, mercati e previsioni".
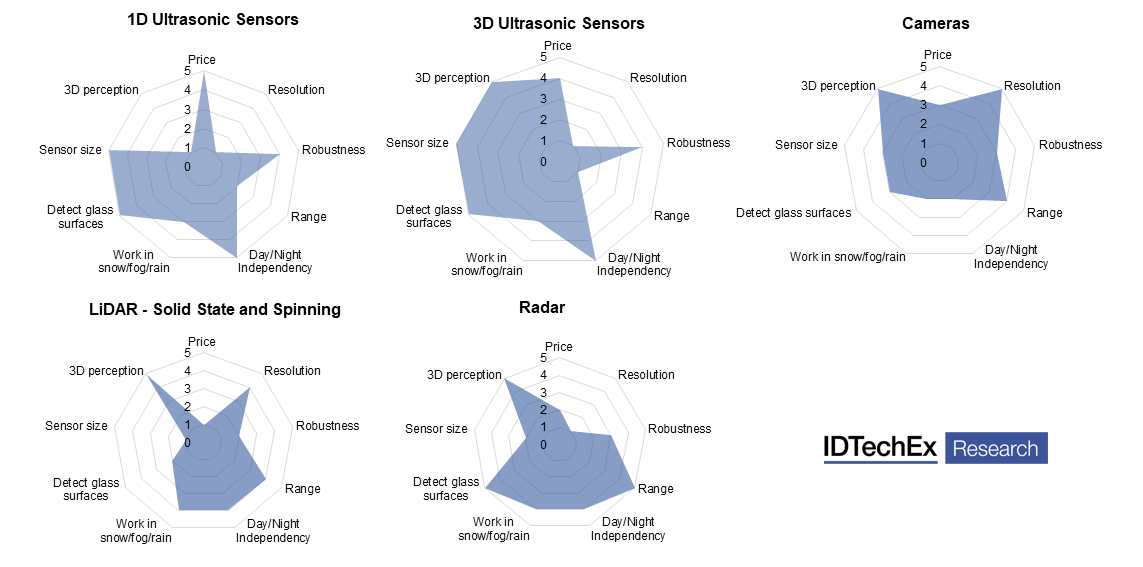
Confronto tra diversi sensori comunemente utilizzati nei robot. Fonte: IDTechEx
Come vengono utilizzati i sensori di visione per la sicurezza dei robot mobili?
La robotica mobile è una delle maggiori applicazioni robotiche in cui le telecamere vengono utilizzate per la classificazione degli oggetti, la sicurezza e la navigazione. I robot mobili si riferiscono principalmente ai veicoli a guida automatica (AGV) e ai robot mobili autonomi (AMR). Tuttavia, anche la mobilità autonoma gioca un ruolo importante in molti robot, da quelli per la consegna di cibo a quelli agricoli autonomi (ad esempio, falciatrici, ecc.), che si basano sulla mobilità autonoma. La mobilità autonoma è un compito intrinsecamente complicato che richiede l'evitamento degli ostacoli e il rilevamento delle collisioni.
La stima della profondità è uno dei passaggi chiave per evitare gli ostacoli. Il compito richiede una o più immagini RGB in ingresso raccolte dai sensori di visione. Queste immagini vengono utilizzate per ricostruire una nuvola di punti 3D con algoritmi di visione artificiale, stimando così la profondità tra l'ostacolo e il robot. In questa fase (2023), la maggior parte dei robot mobili (ad esempio, AGV, AMR, robot per la consegna di cibo, aspirapolvere robotici, ecc.) sono ancora utilizzati al chiuso, ad esempio in magazzini, fabbriche, centri commerciali e ristoranti, dove l'ambiente è ben controllato con una connessione internet e un'illuminazione stabili. Pertanto, le telecamere possono ottenere le migliori prestazioni e le attività di visione artificiale possono essere eseguite sul cloud, riducendo in modo significativo la potenza di calcolo necessaria per il robot stesso, con conseguente riduzione dei costi. Ad esempio, le telecamere sono necessarie solo per monitorare il nastro magnetico o il codice QR sul pavimento per gli AGV basati su griglia. Sebbene questa soluzione sia stata ampiamente utilizzata e sia di moda al giorno d'oggi, non funziona bene per i robot che camminano lateralmente all'aperto o per i robot di ispezione che lavorano in aree con copertura Wi-Fi limitata (ad esempio, sotto le chiome degli alberi, ecc.). Per risolvere questo problema, oggi si sta affermando la tecnica della computer vision in-camera. Come indica il nome, l'elaborazione dell'immagine avviene all'interno della telecamera. A causa della crescente domanda di robot per esterni, IDTechEx ritiene che la computer vision in-camera sarà sempre più necessaria nel lungo termine, soprattutto per quelli progettati per lavorare su terreni difficili e in ambienti ostili (ad esempio, i robot da esplorazione, ecc.). Tuttavia, a breve termine, IDTechEx ritiene che il consumo di energia della visione computerizzata a bordo, insieme ai costi elevati dei chip, ne freneranno probabilmente l'adozione. IDTechEx ritiene che molti produttori di apparecchiature originali per robot (OEM) preferirebbero incorporare altri sensori (ad esempio, sensori a ultrasuoni, LiDAR, ecc.) come primo passo per migliorare la sicurezza e la robustezza della capacità di percezione dell'ambiente dei loro prodotti.
Un'analisi più dettagliata della tendenza e del modo in cui i diversi sensori vengono utilizzati insieme è contenuta nell'ultimo rapporto di IDTechEx, "Sensori per la robotica 2023-2043: tecnologie, mercati e previsioni".