Automotive Radar Future - Miniaturising Size & Maximising Performance
Nov 17, 2023
Il radar è stata una delle aggiunte più significative ai veicoli negli ultimi due decenni. Fornisce funzioni di lusso dei sistemi avanzati di assistenza alla guida (ADAS), come il cruise control adattivo (ACC), e funzioni di sicurezza fondamentali come la frenata automatica d'emergenza e il rilevamento degli angoli ciechi. Da costoso accessorio delle auto di fascia alta, il sistema è diventato quasi onnipresente in tutte le fasce di prezzo.
La ricerca condotta da IDTechEx in "Radar automobilistico 2024-2044: previsioni, tecnologie, applicazioni" mostra che, in media, il 70% delle nuove autovetture spedite nel 2022 aveva un radar frontale, mentre il 30% aveva un radar laterale. Tuttavia, con i sistemi ADAS sempre più sofisticati e i sistemi autonomi di livello 3 che entrano per la prima volta sul mercato, la tecnologia radar deve migliorare per soddisfare le nuove esigenze di prestazioni richieste da questi sistemi. Per questo motivo, il settore sta assistendo all'arrivo sul mercato delle prime generazioni di radar "4D imaging" e al loro impiego sui veicoli. Tenendo conto di ciò, IDTechEx analizza cosa sia un radar a immagine 4D, perché sia necessario e quali siano le nuove tecnologie utilizzate.
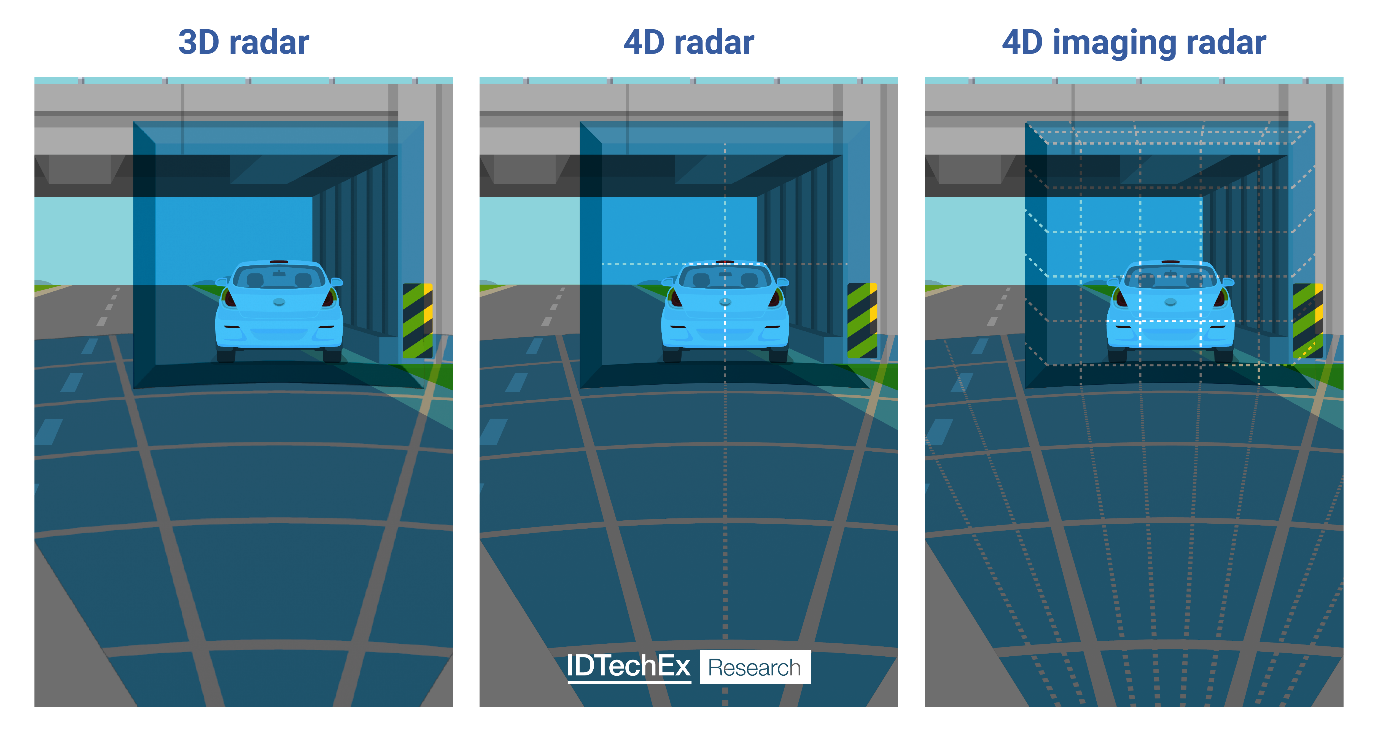
IDTechEx illustra le differenze tra radar 3D, 4D e 4D. Fonte: IDTechEx
Che cos'è un radar per immagini 4D?
In primo luogo, un radar 4D non è automaticamente un radar per immagini. Le due terminologie possono talvolta sembrare intercambiabili; tuttavia, IDTechEx ritiene che sia importante fare una distinzione tra le due. In passato, la maggior parte dei radar si limitava a 3 dimensioni: azimut (angolo orizzontale), distanza e velocità. Un radar 4D significa semplicemente l'aggiunta di una certa capacità di risoluzione nella direzione dell'elevazione.
Un esempio classico che evidenzia la necessità di questa quarta dimensione è lo scenario del rilevamento di un'auto parcheggiata all'ingresso di un tunnel. Un radar 3D restituisce gli stessi risultati sia che ci sia o meno un'auto all'ingresso. Normalmente, il veicolo assume che l'ampio riflesso sia un tunnel e il sistema di controllo adattivo della velocità di crociera continua. Questo comportamento è perfettamente accettabile se al volante c'è un essere umano che può escludere il sistema ACC di conseguenza, ma diventa un problema per i veicoli che operano al livello SAE 3 e oltre, che è diventato una realtà del mondo reale negli ultimi due anni.
In teoria, un radar 4D supererà questo problema. L'aggiunta della risoluzione verticale significa che il radar dovrebbe essere in grado di separare il veicolo fermo a livello del suolo dal tunnel a pochi metri sopra il ponte. Tuttavia, se la risoluzione verticale è scarsa al punto che il tunnel e l'auto sono ancora presenti nello stesso "pixel", la situazione non è migliorata. È qui che entra in gioco la distinzione tra radar 4D e radar a immagini 4D. Il radar a immagini dovrebbe avere una risoluzione angolare sufficiente a distinguere il tunnel e il veicolo anche a distanze molto elevate. In realtà, IDTechEx ritiene che un radar a immagini dovrebbe avere una risoluzione sufficiente per distinguere ostacoli molto più piccoli a grandi distanze, ad esempio una persona sulla strada a 100 metri. Ma qual è la risoluzione necessaria per farlo? Supponendo che la persona sia alta 5-6 piedi, sarebbe necessaria una risoluzione di circa 1˚ per separare la persona dalla strada. In questo scenario, il sistema avrebbe abbastanza tempo per attivare i freni e fermare il veicolo, evitando una collisione, anche a velocità autostradali.
Tuttavia, una cosa è riuscire a rilevare una persona; un'altra è classificarla correttamente come tale con i soli dati radar. Per questo motivo il radar viene solitamente affiancato da telecamere frontali per applicazioni come la frenata automatica di emergenza. Di notte, in condizioni di nebbia o di pioggia battente, la telecamera potrebbe non essere in grado di vedere. In queste situazioni, ci sono alcune opzioni: aggiungere al veicolo un sistema di rilevamento a infrarossi a onde corte o lunghe, che fornisce una risoluzione simile a quella della telecamera e una resistenza alle condizioni di scarsa visibilità, aggiungere al veicolo un LiDAR, con capacità di rilevamento simili a quelle del radar ma a un costo elevato, oppure migliorare ulteriormente la risoluzione del radar.
Arrivare alla risoluzione di 1˚ e oltre
Il radar ha un limite fisico naturale alle sue prestazioni di risoluzione, noto come criterio di Rayleigh, che è proporzionale all'inverso della frequenza moltiplicato per la dimensione dell'apertura (). In breve, un normale radar per autoveicoli operante a 77 GHz e con un array di antenne largo 10 cm dovrebbe essere in grado di raggiungere una risoluzione di 2,8˚ . A titolo di confronto, un tipico occhio umano è in grado di risolvere circa 0,005-0,01˚, sufficiente per vedere un oggetto di 1 cm a 100 metri di distanza. Per migliorare la risoluzione del radar si potrebbe aumentare la sua frequenza operativa, dato che gli esseri umani utilizzano la luce visibile che è nell'ordine delle centinaia di terahertz. Tuttavia, la frequenza dei radar è limitata dalle normative e non è facilmente modificabile.
L'opzione successiva è quella di aumentare le dimensioni dell'apertura. Sebbene sia tecnicamente possibile, questa operazione si scontra con problemi di praticità. Per passare da 2,8˚ a 1˚, l'apertura deve passare da 10 cm a 28 cm. Per ottenere questa risoluzione sia in azimut che in elevazione, il radar è ora di 28 cm x 28 cm, il che sarà difficile da integrare nel paraurti anteriore. Probabilmente causerà problemi di flusso d'aria al radiatore, potrebbe essere difficile da proteggere da eventuali danni e causerà qualche grattacapo ai team estetici degli OEM. IDTechEx ha visto radar sempre più grandi, con esempi come l'ARS540 di Continental, l'FR5+ di Bosch e il Phoenix di Arbe che superano tutti i 10 cm, ma il più grande di questi, il Phoenix, è ancora solo 12,7 cm x 14,3 cm.
Un altro problema nella creazione di radar più grandi è quello di riempirli di canali. Creare un radar di 28 cm x 28 cm senza la tecnologia dei semiconduttori sarebbe come costruire un obiettivo per fotocamera DSLR da 10.000 dollari e accoppiarlo con un sensore per cellulare da 1 MP del 2001. In questo caso, l'analogia con i pixel è rappresentata dai canali virtuali, ovvero il multiplo dei canali di trasmissione e ricezione (Tx e Rx) di un radar. In passato un radar 3D poteva avere un canale di trasmissione e tre di ricezione (1Tx/3Rx). Un radar 4D di base utilizzerebbe probabilmente un ricetrasmettitore radar con una disposizione 3Tx/4Rx, mentre alcuni radar di punta combinano quattro di questi chip per ottenere una disposizione 12Tx/16Rx con 192 canali virtuali. Arbe ha sviluppato un chipset che arriva a 48Tx/48Rx in un singolo radar, fornendo 2.304 canali virtuali. Questo aiuta Arbe a raggiungere una risoluzione di 1˚ in azimut e di 1,7˚ in elevazione.
Un modo per combattere le sfide legate alla costruzione di un radar molto grande è quello di distribuirlo in qualche modo. IDTechEx ha visto un paio di approcci in tal senso. Uno di Zendar prevede l'utilizzo di due radar a prestazioni inferiori posizionati alle estremità opposte del paraurti e che lavorano insieme. Ora, le dimensioni dell'apertura sono passate da meno di 10 cm a 1,5-2 metri. Di conseguenza, la risoluzione di questi due radar che lavorano insieme è di poco superiore a 0,1˚ nell'azimut. L'altro approccio che IDTechEx ha visto è quello di costruire schede d'antenna separate per ciascun canale (su un radar 3Tx/4Rx) e posizionarle sul paraurti. Questa è la strada di sviluppo esplorata da Plastic Omnium e Greener Wave.
Il software è un altro aspetto fondamentale di questa discussione e quasi tutte le aziende citate utilizzeranno un qualche tipo di software per la super risoluzione per migliorare le loro prestazioni. Tornando all'analogia con la macchina fotografica, le moderne fotocamere DSLR sono dotate di potenti processori in grado di sfruttare al meglio un'immagine, mentre le fotocamere dei moderni telefoni sono state oggetto di anni di sviluppo software per produrre i risultati più nitidi e naturali. Nel campo dei radar, ci sono alcuni esempi di start-up che stanno realizzando algoritmi esemplari per migliorare la risoluzione dei radar senza apportare alcuna modifica fisica. Zadar Labs utilizza tecnologie come l'apprendimento automatico, l'intelligenza artificiale e i segnali di trasmissione codificati per migliorare le prestazioni dei radar. Spartan, invece, utilizza un algoritmo basato sulla ricerca per le applicazioni dei jet da combattimento F-18 e F-35. Il software di super-risoluzione può migliorare la risoluzione angolare di un fattore 4, portando un radar standard con risoluzione angolare di 2,8˚ a 0,5-1˚ e più in basso se utilizza già alcune delle altre tecniche discusse qui.
La scansione è un'altra opzione promettente per i radar. L'antenna metamateriale di Metawave utilizza tecnologie di beamforming e beam steering per concentrare le prestazioni del radar in un sottile ventaglio. Questo ventaglio viene poi scansionato attraverso il campo visivo in elevazione desiderato, fornendo prestazioni di risoluzione migliorate sia in elevazione che in azimut. L'altro vantaggio di questa tecnologia è che l'energia di emissione viene distribuita su un'area molto più piccola rispetto a un approccio di tipo flash, il che significa che può raggiungere portate più lunghe rispetto a un equivalente senza scansione.
Con tutte queste opzioni per la costruzione della prossima generazione di radar, come si può sapere qual è la migliore? Il rapporto "Radar automobilistico 2024-2044: previsioni, tecnologie, applicazioni" di IDTechEx approfondisce ulteriormente il funzionamento di queste tecnologie e il miglioramento delle prestazioni dei radar. Il rapporto presenta anche un'analisi di benchmarking per mettere a confronto queste tecnologie su indicatori di prestazioni chiave come la risoluzione angolare, la portata, il campo visivo e la frequenza dei fotogrammi, identificando quale tecnologia produce il miglior pacchetto complessivo, con alcuni risultati inaspettati.
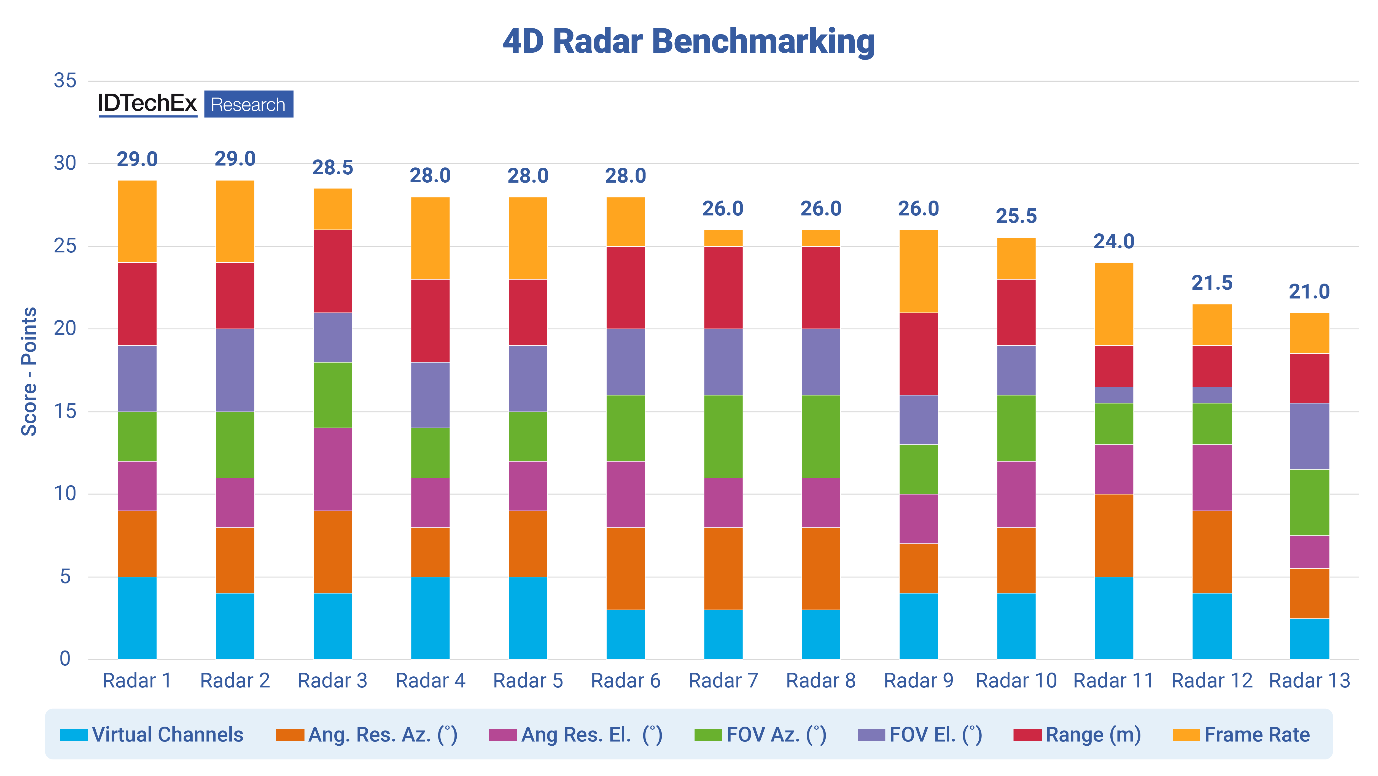
Analisi comparativa della tecnologia radar IDTechEx. Fonte: IDTechEx
L'ultimo rapporto di IDTechEx, "Radar automobilistico 2024-2044: previsioni, tecnologie, applicazioni", fornisce una panoramica olistica del settore dei radar per autoveicoli, compresi i prodotti di primo e secondo livello, le quote di mercato, le start-up, le nuove tecnologie, i requisiti dei materiali, i mercati autonomi e ADAS e le previsioni a 20 anni.
Per il rapporto completo e le pagine campione scaricabili, consultare il sito www.IDTechEx.com/Radar. Per ulteriori informazioni sull'intero portafoglio di ricerche IDTechEx e su come accedere ai dati e alle analisi degli esperti nell'ambito di un abbonamento alle informazioni di mercato, visitare il sito www.IDTechEx.com.