Coordinating autonomy and energy independence in vehicles
Nov 11, 2015
It is a no brainer. The ultimate vehicle by land water and air is independent in performance of task and in provision of its motive power. The end game is usually electric vehicles because they are the greenest, most controllable and perform the most precise tasks in the most efficient way possible. True, we have had even greener technology since the dawn of time in the sailing boat and other mechanically energy independent vehicles. The bicycle, the surfboard and so on have followed but they tend to involve poor control and considerable human effort and safety issues. Accidents with two wheelers have not improved in decades. Where appropriate, sails and so on are being combined with electrical energy independence. However, the big story is combining autonomy in navigation and task - what we call the "autonomous vehicle (AV)"- with the electrically energy independent vehicle (EIV).
System and product integration is essential
EIV technology is more than just adding something such as a solar panel to a vehicle: in should be integrated by a product integrator. The system must be integrated too. Like plug-in electric vehicles before them, the big benefits are only enjoyed when the vehicle is designed to purpose - born electric and born EIV - and configured to task from the outset as shown below.
EIV: not just adding something to a vehicle.
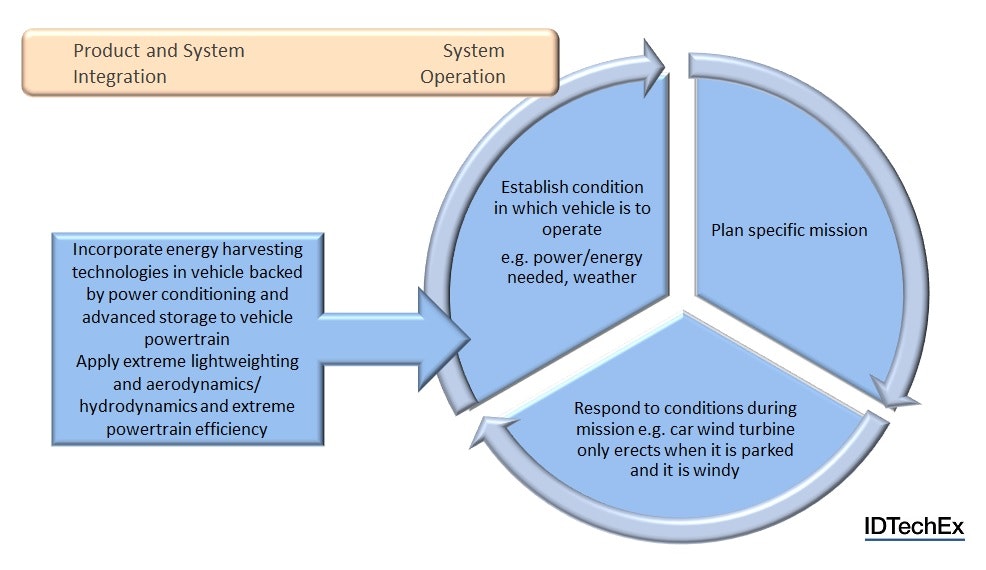
Source: IDTechEx
Integrating autonomy of navigation and task completion to EIV functionality is also best performed by consideration at the very earliest stage of design as shown below.
Autonomous operation + EIV: a synergistic ecosystem. IOT = Internet of Things

Source: IDTechEx
Potential on land
On land, the first autonomous vehicles sold commercially were tractors. More recently, Komatsu has sold 100 of its giant mining trucks in autonomous form. Such vehicles consume huge amounts of energy and are the last things to be candidates for electrical energy autonomy from photovoltaic skin, on-board wind turbines, aerial wind energy (AWE) from kite generators and so on. The same is true to a lesser extent for autonomous cars with their fairly high power requirement to accelerate out of trouble in road systems not designed for them. Partial autonomy of cars is relatively simple and it is rapidly being introduced, from queue holding to automatic parking but full autonomy in roads populated by pedestrians, walking police, cyclists and other hazards is a massive legal and social problem that will take some time to resolve in the courts as much as in the laboratories.
It is in the small land vehicles that we see the confluence of AV and EIV with agricultural mobile robots inspecting vineyards, the planned robot postmen on sidewalks and so on. Starship Technologies says its postal robot travelling at about 6 km/hr could make local deliveries in 30 minutes or less. The technology could be useful for neighborhood restaurants and retailers. Because the robot is largely automated, requiring almost no human involvement, Starship Technologies thinks the costs of delivering goods will drop by an order of magnitude. The slow speed and grounded approach also removes some of the safety concerns with drone delivery. Initially it is plug in but it could easily be photovoltaic, getting most of its power into the battery while it is not in use, with panels or the new solar fabrics extending to gain extra area.
Automated mission planning would take into account the weather and the delivery route required. Starship Technologies already maps out areas ahead of time so that the robot can navigate safely on its own. It relies on sensors and cameras to maintain an awareness of its surroundings. It includes speakers so that a distant operator can speak to pedestrians.
"If somebody bothers the robot the operator can actually shout — 'Hey, what are you doing?' " Heinla told the BBC. "If somebody tries to steal something the operator can actually yell 'The police are coming in five minutes! We know your location, you're being filmed as well.' "
Potential at sea
Similarly at sea several large boats are being developed that will be autonomous but they need prodigious amounts of energy to go along. To some extent this is offset by the wider choice of energy harvesting technologies such as making electricity from the huge energy of the waves and the wind at sea. AWE is used on a few ships to produce tens of kilowatts for tasks at the bow end rather than take it from the traction power at the stern. However, the law tends to require ships to carry enough fuel to get home regardless of whether energy harvesting can do the job. Indeed, at a recent conference on marine electrification in Amsterdam the general view was that energy harvesting for ships is not yet viable. Mechanically harvesting oncoming waves to lift the craft in the water to reduce drag is promising. Solar sails will be widely deployed but not yet.
Small marine craft are sometimes becoming autonomous and energy independent such as the UK MARS project where a small sailing boat will cross the oceans autonomously using sail or solar alone as appropriate. A battery stores energy for night propulsion and some such craft have reversing propellers to generate a useful three kilowatts while under sail with modest effect on sailing performance. Really slow vehicles such as oil gathering robot craft get by on just solar power and autonomy. Like wireless sensor networks in the ocean, they can transmit data to each other when they approach and power is available and they can collaborate. Thus computer mesh networks and swarming protocols can be part of an integrated deployment.
Potential in the air
In contrast with the situation on land and at sea, both large and small aerial vehicles are already both autonomous and EIV in many cases. There are airships deployed for ten years just on sunshine and fixed wing aircraft soon to be deployed for five years just on sunshine. In its new report, Energy Independent Electric Vehicle Technology Roadmap 2016-2036 IDTechEx finds land vehicles typically generating 0.3-1.5 kW peak, having batteries of 2-15 kWh and "perpetual" speeds of 1 km/hr for robot inspection up to 100 km/hr for solar racers. On the other hand, the figures in the air vary from under 0.1 kW for a cruising medium-sized drone to 52 kW for an autonomous airship with its vast area of photovoltaics. Batteries are 1-87 kWh and "perpetual" speeds are 15-100 km/hr.
Common systems architecture
At the Autonomous and Intelligent Systems, Virtual Engineering Centre of the University of Liverpool UK, Dr Charles Padgett is developing a common systems architecture for autonomous vehicles. He says, "An autonomous vehicle system acts as an operator substitute by making decisions to successfully accomplish its mission, based on its objectives. It has to interact with and contextually understand its external environment and recognise opportunities and constraints that impact on achieving it objectives. This is true for its internal environment, constantly monitoring its status and health, in terms of system faults and failures, and taking appropriate remedial action, as a normal operator would be expected to do. For this, architecture, originally based on an autonomous unmanned aircraft, has been abstracted to be applicable to all vehicles". It is all coming together.
For overviews of markets and technologies see the IDTechEx reports, Autonomous Vehicles, Land, Water and Air 2015-2025 and Energy Independent Vehicles 2016-2026.